


















Motor protection circuit breaker MPE25 - Understanding the Tripping Characteristics
Motor protection circuit breaker is a crucial component for protecting asynchronous motors from overloads and short circuits. To understand how the protection works, it's important to first understand the basic operation of an asynchronous motor.

Image 1: Motor prtection circuit breaker
What happens during the startup of an asynchronous motor?
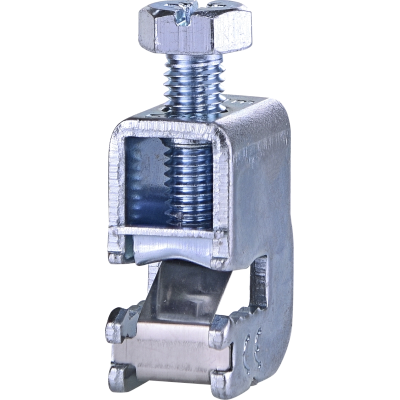
When an electric motor is directly connected to the network with a switch, a large inrush current, I_inrush (3-8* I_rated), flows at the moment of startup. This current decreases as the motor speed increases. The rated current of the motor is the current that would flow through the stator windings if the motor were operating at rated load. It depends on the motor's power rating. Figure 2 shows the current characteristic of an asynchronous motor. From the figure, it's clear that the inrush current is higher than the rated current. It's worth mentioning that in the case of the motor running unloaded, the startup time (T_start) would be significantly shorter, and the current after the startup time would be much lower than the rated current, as the motor is not loaded. In the case of a heavy startup, the startup time might be longer. In the case of motor overload, the current would exceed the rated current, which is undesirable. If the overload lasts too long, the motor protection (bimetallic relay, motor protection circuit breaker...)
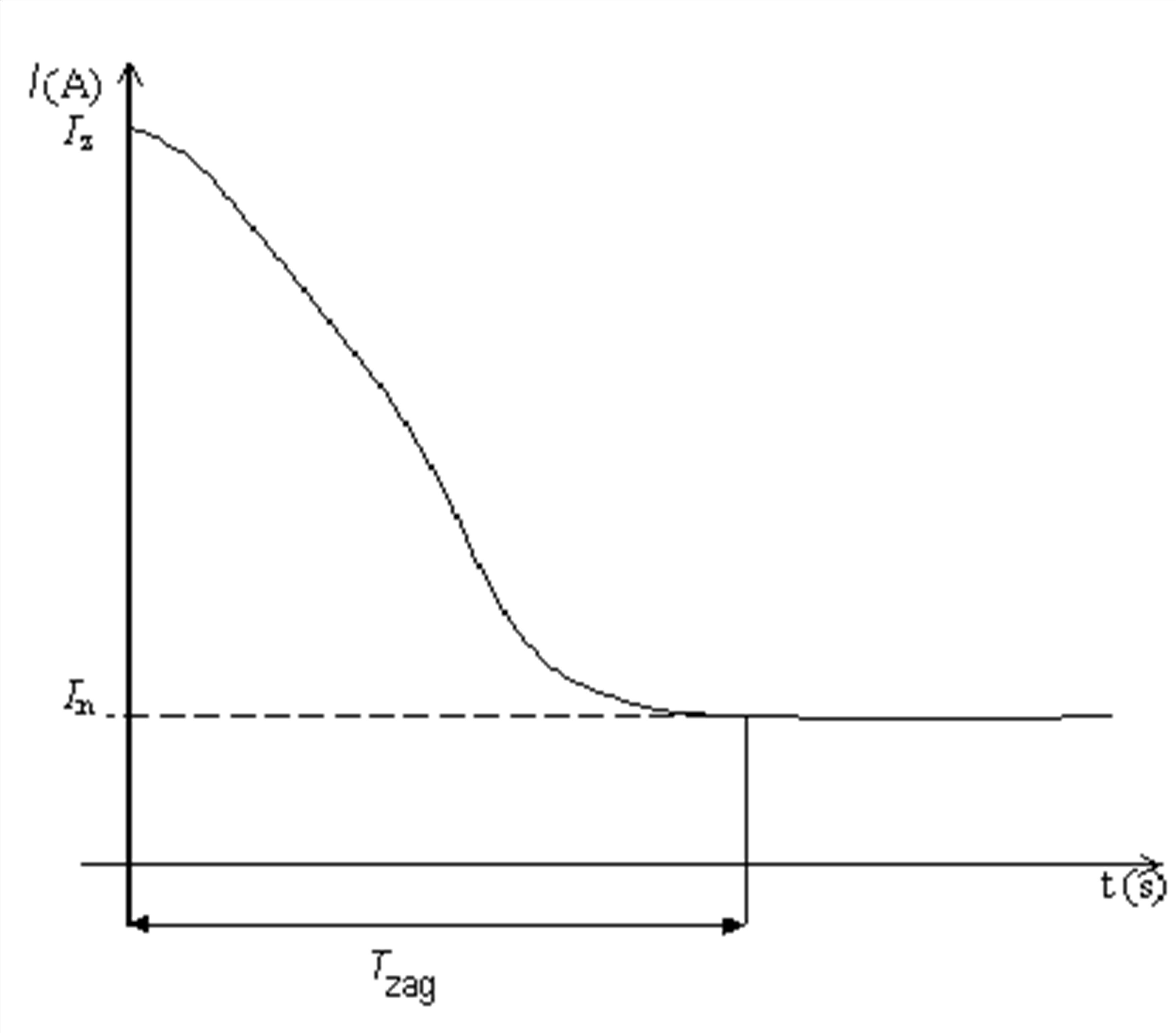
Image 2: Current characteristic of an asyncronous motor
MPE 25 and its Tripping Characteristics
The MPE 25 (Figure 1) contains a bimetallic protection that protects the motor from overloads and an electromagnetic short-circuit protection to safeguard against short circuits. The switch includes an adjustable overload protection (I_r = 0.63 - 1 x I_u) and a fixed short-circuit protection (I = 13 x I_u). I_u is the rated current of the motor protection circuit breaker, and if we look at Figure 3 (the current-time or I-t characteristic of the MPE25, or the tripping characteristic), the left side of the characteristic represents the operation of the bimetallic protection trigger element, while the right side shows the operation of the electromagnetic (short-circuit) trigger element. Assuming our motor’s rated current is 16 A, the overload trigger can be set between 10 and 16 A. The short-circuit trigger is factory-set to 13 x I_u, which equals 208 A. It is crucial that the short-circuit trigger is set lower than the minimum possible short-circuit current and higher than the motor’s inrush current to avoid unnecessary trips during startup.
On the left side of the I-t characteristic of the motor protection circuit breaker, which represents the bimetallic protection trigger, we can see that the higher the current, the shorter the time before the bimetallic trigger acts in the switch.
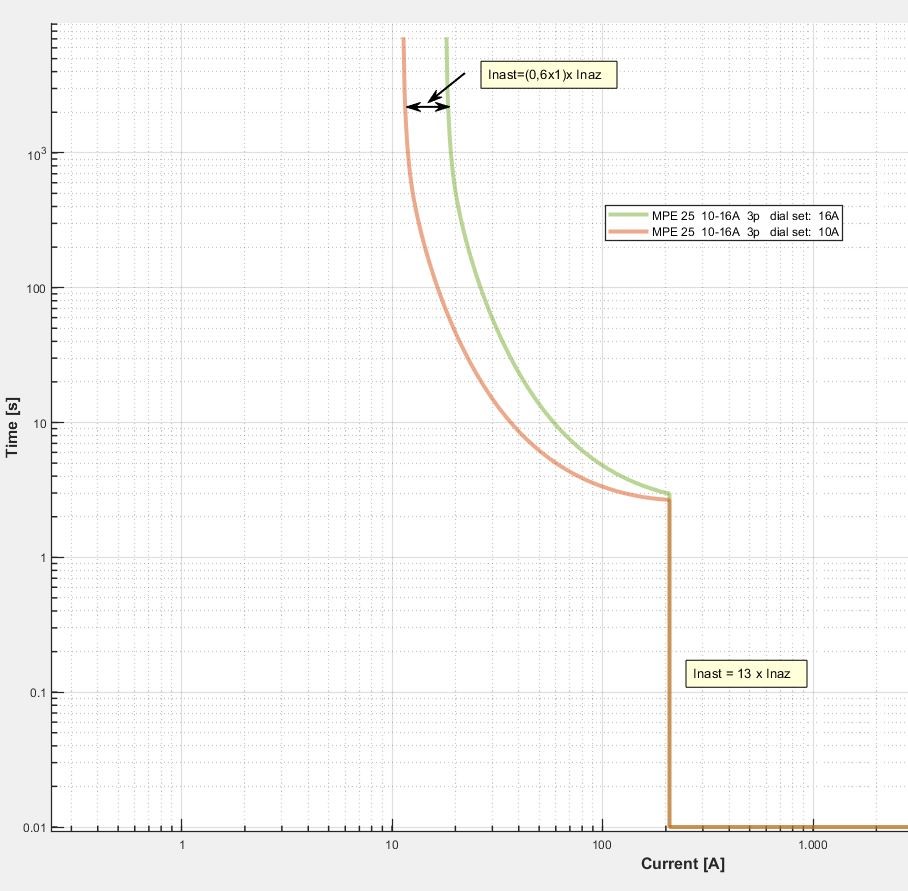
Image 3: I-t characteristic of the MPE 25 10-16 A
Example of Use
Let’s consider an asynchronous motor with a rated current of 13 A. We choose the MPE 25 (10-16A). Our task is to set the current on the MPE25 using a screwdriver (see Figure 1 above, left). Since the motor protection circuit breaker is adjustable between 10 and 16 A, we set it to position 0.81, which corresponds to 13 A.
Figure 4 shows the operation of the MPE during overloads. Let's assume that the motor is driving a circular saw and encounters a jam, causing the asynchronous motor to become overloaded. The current is greater than the motor’s rated current, which is problematic because it could shorten the motor's lifespan or even damage it. If the current through the stator windings, for example, becomes 1.5 times the rated current (1.5 x 13 A = 19.5 A), we can see from Figure 4 that the bimetallic protection responds in approximately 143 seconds. Now, let’s assume the motor is more heavily loaded, say 100% above the rated load (2 x 13A = 26 A). From Figure 4, we can see that the trip time would be around 44 seconds. The I-t characteristic of MPE 25 tells us that the higher the current, the shorter the tripping time of the MPE 25. There are certain variations in the trip time, depending on whether the motor protection switch was previously warm or cold. It is also worth noting that the motor protection switch has a much lower I-t characteristic than a fuse or a circuit breaker, so using these two protection elements alone is not sufficient for protecting the motor against overloads.
Now, let’s assume a short circuit occurs between two or three phase terminals on the motor.If the short-circuit current is significantly higher than 208 A, the electromagnetic or short-circuit trigger will act immediately, in a few milliseconds, and the motor protection circuit breaker will disconnect the main contacts. So, in our case with the MPE 25 (10-16 A), any current above 13 x I_u (208 A) will result in an immediate trip. This is shown on the right side of the I-t characteristic in Figures 3 and 4.
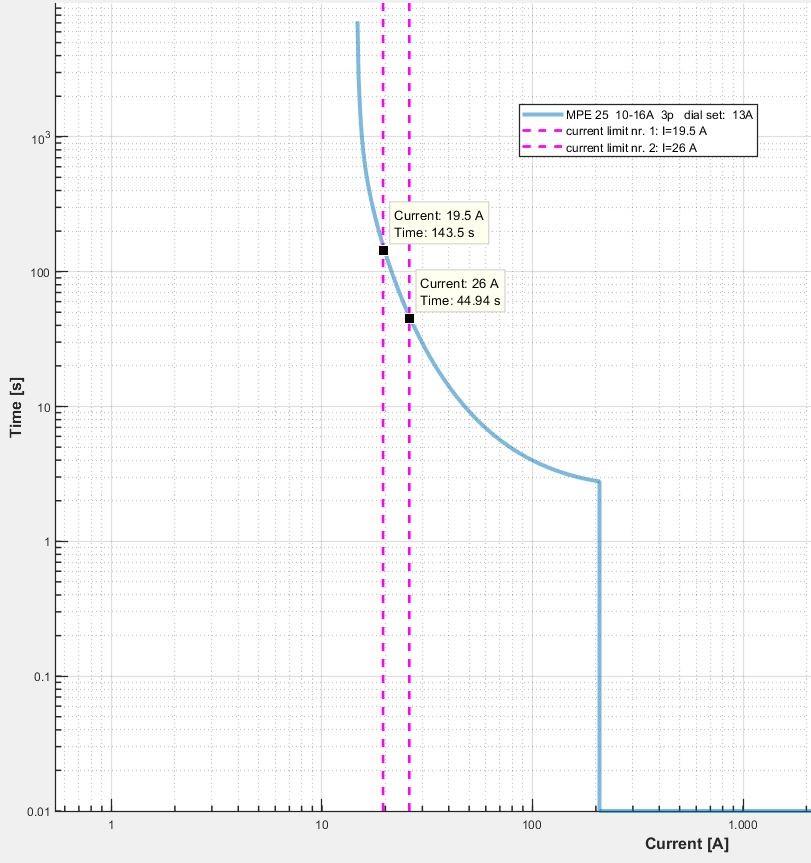
Image 4: Operation of the MPE25 under overload conditions
Conclusion
Motor protection circuit breakers are available for various rated currents, and the choice depends on the motor's power rating. The motor protection circuit breaker also indicates whether the trip was due to manual operation or an overload condition. These switches also offer the option to add auxiliary contacts, which can show the cause of the failure, as well as the function of undervoltage protection.